Computer Systems
|
Career Models The career that I want to have is a Physician. More importantly, a Family Physician. I've always wanted to go into the medical field to find and cure diseases and also to treat patients with sicknesses.This video on the right shows a person talking about how to become a family physician (showing what to take in university and how long) and also how a family physician's day it. |
|
|
|
Current Developments in Robotics The development and advancements of robots have been the talk of the 21st century. The robots that were created were done to perform different tasks in different ways. However, when we compare humans with robots, there is a hey value that distinguishes humans from robots and that is that humans have feelings. In this video, the person talks about that with a little animation and programming, how a person can create a robot that has very simple human feelings. |

Hardware Research Presentation
For this assignment, everyone in our class was given a different topic to base their hardware research on. My topic was projectors. In my presentation, I talked about what a projector is, a brief history, the different types of projectors out there, how they all work, future trends, and also what companies manufacture them. There are three main types of projectors and they are: CRTs(Cathode Ray Tubes), LCDs (Liquid Crystal Display, and also DLPs (Digital Light Processing). However when it comes to specifications, they all have the same requirements which are: Resolution, Throw Ratio, Input Capabilities, and Display capabilities. In conclusion, I learnt a lot about projectors and I also (in my perspective) seemed to have added the right information to give people an idea about this category of hardware devices.
For this assignment, everyone in our class was given a different topic to base their hardware research on. My topic was projectors. In my presentation, I talked about what a projector is, a brief history, the different types of projectors out there, how they all work, future trends, and also what companies manufacture them. There are three main types of projectors and they are: CRTs(Cathode Ray Tubes), LCDs (Liquid Crystal Display, and also DLPs (Digital Light Processing). However when it comes to specifications, they all have the same requirements which are: Resolution, Throw Ratio, Input Capabilities, and Display capabilities. In conclusion, I learnt a lot about projectors and I also (in my perspective) seemed to have added the right information to give people an idea about this category of hardware devices.

Build Your Own PC Assignment
In this assignment, we were supposed to custom build a PC with a budget of $1500( with taxes). I studied each part based on their functionality, because I optimized my custom PC for school work and somewhat occasional gaming. My PC's specs included having a 1TB SATA hard drive that has enough room for saving work, AMD Radeon R7 240 Graphics that give amazing quality for gaming, and DTS Sound +TM which gives spectacular sound so I can watch movies and games. The main objective was to be able to identify the different computer components and to be able to manage a given budget. After picking out all my items, my total added up to be $1360.40 (with taxes).
In this assignment, we were supposed to custom build a PC with a budget of $1500( with taxes). I studied each part based on their functionality, because I optimized my custom PC for school work and somewhat occasional gaming. My PC's specs included having a 1TB SATA hard drive that has enough room for saving work, AMD Radeon R7 240 Graphics that give amazing quality for gaming, and DTS Sound +TM which gives spectacular sound so I can watch movies and games. The main objective was to be able to identify the different computer components and to be able to manage a given budget. After picking out all my items, my total added up to be $1360.40 (with taxes).
|
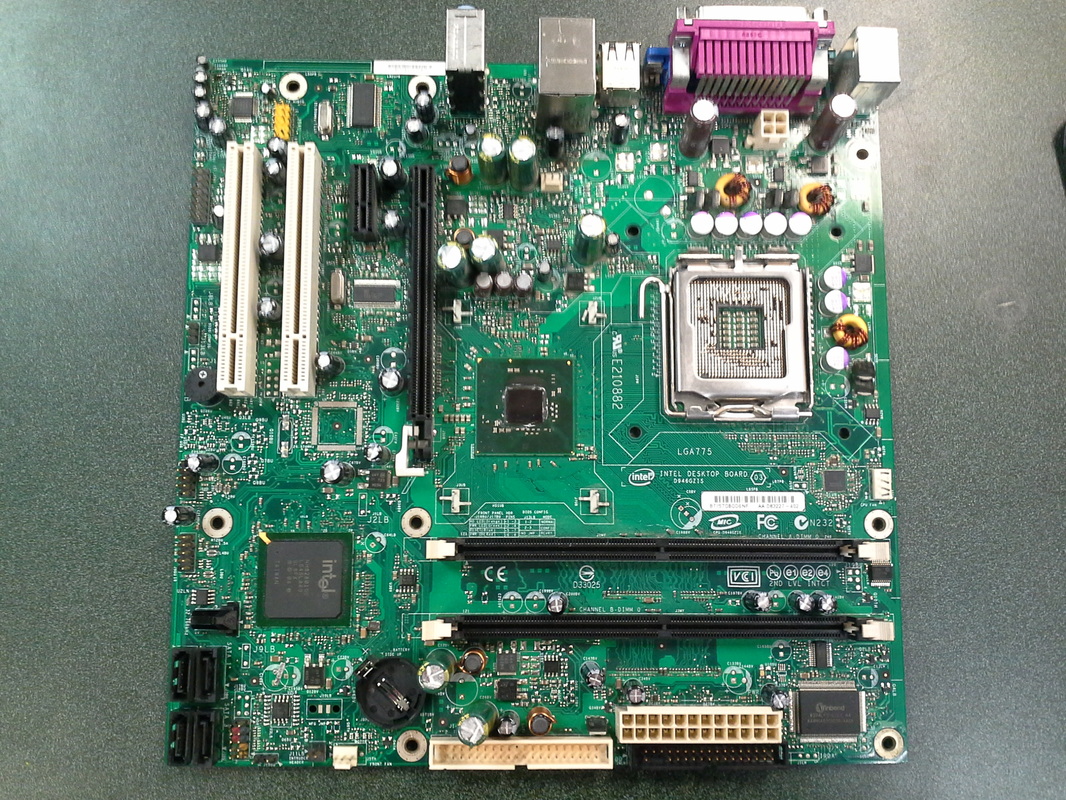
Hardware Investigation
For this assignment we were supposed to take a hardware component related to the PC and do research about it. I decided to do the motherboard. However since we weren't able to take apart some of the new PCs apart, I was able to take apart an old PC and look at the motherboard. I was asked to draw a schematic design of the motherboard and also to research more about this specific motherboard and give its specifications. Even though it was hard to find any specifications, since this motherboard was out of date, I did learn a lot about the structure and how a motherboard functions. All in all, it was a very intriguing way to learn about the internal components of a PC |
|

Networking
This was a very quick unit, where we had to understand the different types of networks and their compnents and how they are integrated into society.
This was a very quick unit, where we had to understand the different types of networks and their compnents and how they are integrated into society.
Theory and Devices
Computer Networking: Two or more nodes that are connected using some type of physical medium exchanging information using a common networking protocol.
Direction of Data Communication: Serial and Parallel Communications:
-Simplex: One way data communication Serial: one bit of data at a time
-Duplex: Two way data communication(simultaneously) Parallel: more than one bit of data at a time
-Half-Duplex- Two way data communication(one at a time)
Different Types of Networks:
-LAN: Local Area Network (in a building) MAN-Metro Area Network(in a city)
-WAN: Wide Area Network (across cities/countries)
Devices:
-NIC (Network Interface Card): a computer's media interface to connect to a network(e.g. wireless, Ethernet)
-Switches: a hardware device that joins multiple computers together within one local area network (LAN) using copper, wireless, or fibre optic media.
-Router: WAN devices used to connect networks together into Intranets, Extranets and the Internet. They use IP protocol to address the all nodes on the network.
Computer Networking: Two or more nodes that are connected using some type of physical medium exchanging information using a common networking protocol.
Direction of Data Communication: Serial and Parallel Communications:
-Simplex: One way data communication Serial: one bit of data at a time
-Duplex: Two way data communication(simultaneously) Parallel: more than one bit of data at a time
-Half-Duplex- Two way data communication(one at a time)
Different Types of Networks:
-LAN: Local Area Network (in a building) MAN-Metro Area Network(in a city)
-WAN: Wide Area Network (across cities/countries)
Devices:
-NIC (Network Interface Card): a computer's media interface to connect to a network(e.g. wireless, Ethernet)
-Switches: a hardware device that joins multiple computers together within one local area network (LAN) using copper, wireless, or fibre optic media.
-Router: WAN devices used to connect networks together into Intranets, Extranets and the Internet. They use IP protocol to address the all nodes on the network.

Network+ Certification Assignment
The Network+ Certification is an online test to test, if a certain individual is certified for several networking professions.It is a test that lasts for 90 minutes with a maximum of 100 questions and requires a score of 720 to pass( on a scale of 100-900)
What we had to do:
We had to take the test once, review all the answers by copying and pasting onto a word document and then we had to redo the test to see if we had learnt anything. Unfortunately, I did quite horribly in both my turns, receiving my mark as a fail, however I did do better on my second turn than I did on my first turn. After we finished the test for the second time, we had to define some networking terms as well. Even though, i did poorly on the online test, I did learn from it and did pretty well on my Networking Unit Test, which pretty much covered what I had learnt from the online test.
The Network+ Certification is an online test to test, if a certain individual is certified for several networking professions.It is a test that lasts for 90 minutes with a maximum of 100 questions and requires a score of 720 to pass( on a scale of 100-900)
What we had to do:
We had to take the test once, review all the answers by copying and pasting onto a word document and then we had to redo the test to see if we had learnt anything. Unfortunately, I did quite horribly in both my turns, receiving my mark as a fail, however I did do better on my second turn than I did on my first turn. After we finished the test for the second time, we had to define some networking terms as well. Even though, i did poorly on the online test, I did learn from it and did pretty well on my Networking Unit Test, which pretty much covered what I had learnt from the online test.
Network Design Assignment

For this assignment, we had to build a block network diagram, based on the given description for a school and giving a products list for the items that we were supposed to buy to create this network. This diagram consisted of four computer labs each with 20 PCs, 1 printer, and also 1 3D printer. Also, there is another room where there are 20 laptops. All these appliances are connected to a switch which in turn is connected to a core switch which can easily connect to the Internet. The assignment also described there to be four separate servers which are: a file server, a web server, a video server, and finally a logon server.

|
Robotics Systems
In this unit we got into designing robot parts and then combining them together to create robot systems. We used a program known as Autodesk Inventor where we designed robot parts. We started from the basic tutorials that were given to us and then went to design our own little arm contraption that would be added onto the robot. In this unit we also looked at other components of robots. The class was divided up into 4 groups, each a component of a robot. I was in the Sensors group and we were asked to identify the different sensors that are used in a robot. We also learnt about the simple language form computer use which is Binary and also played around with Boolean Logic Gates. We also had to program a NXT robot to complete a task that is in the FLL competition. |
|
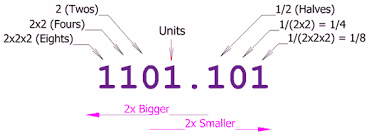
Binary and Logic Gates
This was a very quick part in this unit. We learnt about the simple computer language that computers use to perform a task. Binary, a binomial pair of digits, which are only 1 and 0. We learnt how they can be converted into other forms of binary form, through a form of conversion The Logic Gates were an extension to understand how the binary numerals play, according the different type of logic gate. These two components were later given in a quiz to see if we understood what we had learnt. |
|
FLL Design Report
This report was done according to an assignment that we had in class. We had to program an NXT robot to complete a challenge that is in the FLL competition. Our challenge was the Project Based Learning Challenge where we had to place a bunch of loops with weights on the end to one side of the scale and when the weights are all there, the scale would tip and on the other side would be a picture of the world.
This was a group project and we were divided up into pairs by Mr. Younan. We had to construct a proper design that would be able to perform the challenge with ease. We had a couple of ideas for the robot and in the end we found out the best. However, the programming was tricky. This was because our robot seemed to change its process slightly from the previous test to the next, so we had to keep changing to degrees and how much it turned, because we had to get the exact path at which the robot would come from after it comes to the Home area. After a couple of tests and no clear result both my partner and I decided to paste tape on the ground so it would be easier. WE signifies each place the robot would do something with a piece of tape and eventually we got the robot to perform the task effortlessly.
After finishing the task, we made a design report on the procedure we took and how the whole entire project felt like to us.
This report was done according to an assignment that we had in class. We had to program an NXT robot to complete a challenge that is in the FLL competition. Our challenge was the Project Based Learning Challenge where we had to place a bunch of loops with weights on the end to one side of the scale and when the weights are all there, the scale would tip and on the other side would be a picture of the world.
This was a group project and we were divided up into pairs by Mr. Younan. We had to construct a proper design that would be able to perform the challenge with ease. We had a couple of ideas for the robot and in the end we found out the best. However, the programming was tricky. This was because our robot seemed to change its process slightly from the previous test to the next, so we had to keep changing to degrees and how much it turned, because we had to get the exact path at which the robot would come from after it comes to the Home area. After a couple of tests and no clear result both my partner and I decided to paste tape on the ground so it would be easier. WE signifies each place the robot would do something with a piece of tape and eventually we got the robot to perform the task effortlessly.
After finishing the task, we made a design report on the procedure we took and how the whole entire project felt like to us.
|
Sensors
I was in the group Sensors and my group and I were supposed to give a brief explanation to the class about the different sensors that are used in robots. As we know, there are many sensors in the world and most are part of a bigger system. Each of us in this group divided ourselves further to get a glimpse of all the different varieties of sensors. I had PROXIMTY SENSORS. Proximity sensors are sensors that can detect objects or obstacles without any physical contact. A proximity sensor transmitter transmits an electromagnetic radiation or creates an electrostatic field and a receiver receives and analyzes the return signal for interruptions. My specific sensor was Ultrasonic sensor. This sensor shoots a very high pitched sound that cannot be heard to the human ear. The sound wave will hit an object and come back to the transmitter and then the wave distance would be analyzed and then the system would be able to react accordingly. This sensor is used in many robots, in games, and work places to find objects and also to not come in contact. For example: a robot with an ultrasonic sensor would be able to detect a wall and then by knowing it is, it then can steer away from it, or act accordingly. Then we put all the individually finished parts into a PowerPoint and presented it to the class. |


|
Autodesk Inventor
This part of the unit in my opinion was the best, because we got to design parts on a computer program and even test them out. The program that we used for creating the parts for the robot system was Autodesk Inventor. I had used this program before last year as well, however I was kind of rusty and needed to brush up on the tools and their works. So, the whole class started on some tutorials to brush up our knowledge on this software. We had to go to some tutorials on YouTube and then do what the tutorials taught us. The tutorials mainly based around creating parts for robots which was helpful. I created a proper wheel to a framework of a robot on this program.
After our tutorial were over with, we were given our summative assignment for the unit. The task we had to do for our summative was to create a robot arm with a gripper on Autodesk Inventor. This assignment was a great way to test what I had learnt from the tutorials and how I could relate to robotics.
This part of the unit in my opinion was the best, because we got to design parts on a computer program and even test them out. The program that we used for creating the parts for the robot system was Autodesk Inventor. I had used this program before last year as well, however I was kind of rusty and needed to brush up on the tools and their works. So, the whole class started on some tutorials to brush up our knowledge on this software. We had to go to some tutorials on YouTube and then do what the tutorials taught us. The tutorials mainly based around creating parts for robots which was helpful. I created a proper wheel to a framework of a robot on this program.
After our tutorial were over with, we were given our summative assignment for the unit. The task we had to do for our summative was to create a robot arm with a gripper on Autodesk Inventor. This assignment was a great way to test what I had learnt from the tutorials and how I could relate to robotics.
|
Programming
This unit was probably the most exciting for me, because I love to program and even though I didn't have much experience coming into this unit, I've always been very fond of learning the backbone of many industrialized systems, which is the code used to make it work. We learnt two programs in this unit, C++ and BASIC Stamp Editor. These were both very interesting programs to use. |
|
C++ Programming
This programming software was the more difficult of the two programming software we learnt in class. We started C++ programming with some basic coding. We had to construct a program that would be able to give out averages for each class over the year(calculator). Then we were supposed to make a program for Christmas. We had to make some questions relating to Christmas and we needed to make it like a game , where someone else would answer these questions and at the end the total number of correct answers would be totaled and a comment depending on the outcome would be given.
This programming software was the more difficult of the two programming software we learnt in class. We started C++ programming with some basic coding. We had to construct a program that would be able to give out averages for each class over the year(calculator). Then we were supposed to make a program for Christmas. We had to make some questions relating to Christmas and we needed to make it like a game , where someone else would answer these questions and at the end the total number of correct answers would be totaled and a comment depending on the outcome would be given.
BASIC Stamp Editor
This programming software was used to program the BOE BOTS which are small robot systems with a microprocessor and they are the basic fundamentals of programming bigger robots which would be used in FRC and so on. Each member in the class was given a BOE BOT and we were supposed to program it according to given tasks on the class site. This program was much more simpler than C++, because there not many functions in this program, however these two programs were still equally fun to use.
This programming software was used to program the BOE BOTS which are small robot systems with a microprocessor and they are the basic fundamentals of programming bigger robots which would be used in FRC and so on. Each member in the class was given a BOE BOT and we were supposed to program it according to given tasks on the class site. This program was much more simpler than C++, because there not many functions in this program, however these two programs were still equally fun to use.
Summative
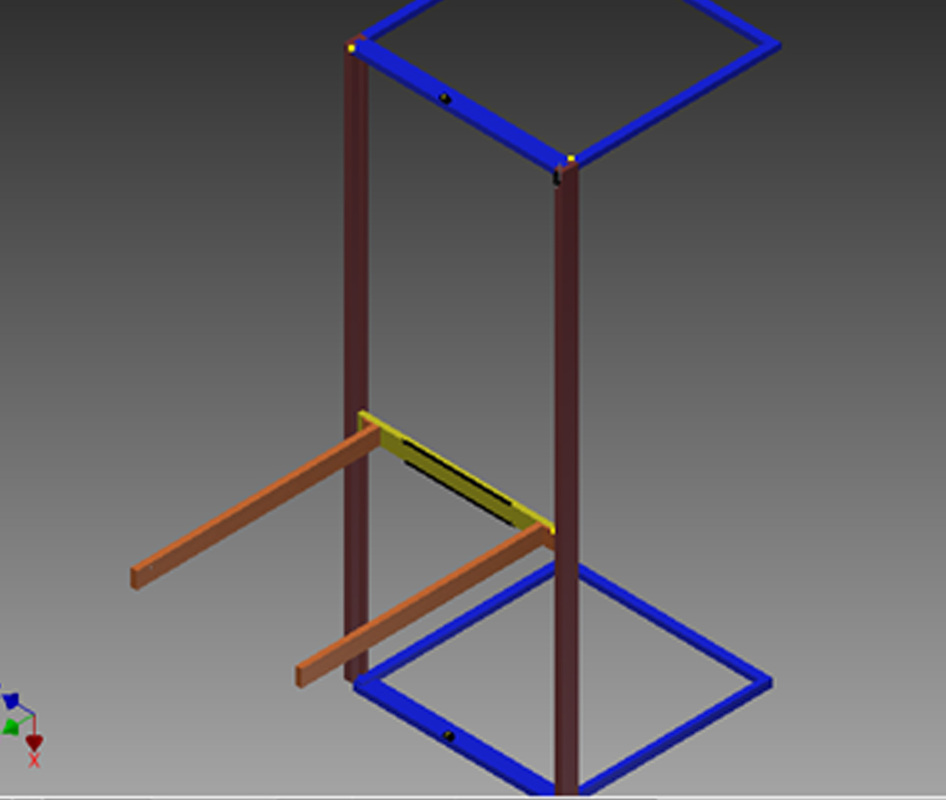
FRC 2015 Robotics Design Project
The summative for the course Robotics was to come up with a design for the FRC challenge this year, which is Recycle Rush. We each had to come up with a design we thought would make an impact to the game and help us win games. The robot design I came up with was an End Effector. This design had the capability to pick up both totes and containers. It process could be related to that of a "fork lift", however, in this design, the robots arms could change its width through the process of a piston. So, the robot would come up to an object garb it by the sides and lift with.After, we had come up with a design, we had to draw our sketch on Autodesk Inventor, and then we had to program it(optional). I was then asked to find these specific parts on the Internet which I did and then I was asked to conclude on how this would be a robust and effective design in the FRC challenge.
FRC 2015 Robotics Design Project
The summative for the course Robotics was to come up with a design for the FRC challenge this year, which is Recycle Rush. We each had to come up with a design we thought would make an impact to the game and help us win games. The robot design I came up with was an End Effector. This design had the capability to pick up both totes and containers. It process could be related to that of a "fork lift", however, in this design, the robots arms could change its width through the process of a piston. So, the robot would come up to an object garb it by the sides and lift with.After, we had come up with a design, we had to draw our sketch on Autodesk Inventor, and then we had to program it(optional). I was then asked to find these specific parts on the Internet which I did and then I was asked to conclude on how this would be a robust and effective design in the FRC challenge.